En 2008 fue el vuelo del abejorro lo que inspiró el prototipo ?BR23C? de coche biomimético de Nissan. En 2009, la tecnología inspirada en los peces es la protagonista del nuevo prototipo de coche robotizado, el Nissan ?EPORO?*1 de Nissan Motor Co., Ltd. Este prototipo ha sido diseñado para desplazarse en grupo siguiendo los patrones de conducta de un banco de peces a la hora de evitar obstáculos sin chocar unos con otros.
Nissan realizará una demostración de esta avanzada tecnología mediante un grupo de seis EPORO durante su presentación mundial en la CEATEC JAPAN 2009, que se celebrará del 6 al 10 de octubre en el centro de convenciones Makuhari Messe.
CEATEC JAPAN es una feria anual que presenta las tecnologías electrónicas y de información más avanzadas. Nissan es el único fabricante de automóviles que ha participado en esta feria desde 2006. Además de presentar el futurista prototipo EPORO, Minoru Shinohara, Vicepresidente Senior de Nissan, realizará el discurso de apertura titulado ?El futuro del automóvil y la evolución de los vehículos eléctricos y la robótica aplicada a los coches?, y participará en una mesa redonda titulada ?El vehículo eléctrico conducirá a una sociedad totalmente electrificada y movilizada?.
Nissan también presentará la nueva tecnología actual de prevención de colisiones del Skyline Crossover*2 y realizará pruebas de conducción para probar un sistema de diagnóstico de conducción ecológica utilizando una aplicación para el iPhone®*3.
Coche robotizado EPORO
 ¿Qué
tienen en común un abejorro y un banco de peces? Ambos cuentan con unas
habilidades extraordinarias para evitar colisiones; navegan de manera instintiva
e inteligente por terrenos
¿Qué
tienen en común un abejorro y un banco de peces? Ambos cuentan con unas
habilidades extraordinarias para evitar colisiones; navegan de manera instintiva
e inteligente por terrenos
difíciles y detectan y evitan los posibles obstáculos ?lo mismo que podrían llegar a hacer los futuros vehículos seguros de Nissan.
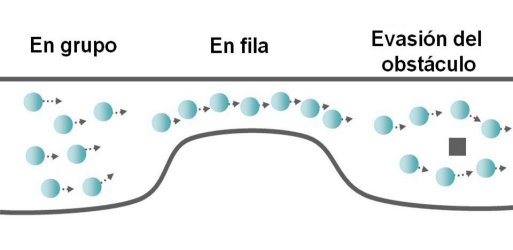
Pero si es probable que los abejorros ?y el coche robotizado BR23C? viajen solos, el comportamiento en grupo de los peces, o de un grupo de vehículos, supone un reto mucho mayor a la hora de evitar una posible colisión. En el momento de desarrollar el EPORO se han aplicado tres reglas de comportamiento de los peces a su control de conducción.
Generalmente los peces reconocen su entorno a través de su sentido lateral y de su vista, y forman bancos siguiendo tres normas de comportamiento. Para el sentido lateral se ha utilizado un localizador láser*4, mientras que para el sentido de la vista se utiliza tecnología de comunicaciones de banda ultra ancha*5.
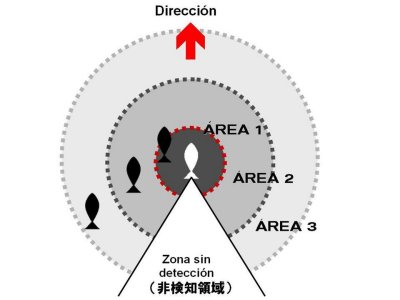 |
Normas de comportamiento de los peces ÁREA 1: Evasión de la colisión Cambiar la trayectoria sin chocar con otros peces. ÁREA 2: Desplazamiento en grupo Desplazamiento en grupo con otros peces manteniendo una cierta distancia entre ellos (para viajar a la misma velocidad). ÁREA 3: Acercamiento El pez se acerca a otros peces que se encuentran a cierta distancia. |
Banco de peces nadando
Toshiyuki Androu, Director del Laboratorio Nissan de Movilidad e ingeniero principal del proyecto del vehículo robotizado, ha declarado: ?En un mundo tan motorizado, tenemos mucho que aprender del comportamiento de un banco de peces, en términos del grado de libertad y seguridad que tiene un pez dentro de un banco y de la gran eficiencia migratoria de un banco de peces por sí mismo. En el EPORO hemos recreado el comportamiento de un banco de peces mediante tecnología electrónica de última generación. Al compartir la información que recibe cada componente del grupo de sus compañeros, a través de tecnología de comunicación, el grupo de vehículos EPORO puede desplazarse de manera segura y cambiar de forma si lo necesita?.
Éste es el primer coche robotizado que se puede desplazar en grupo compartiendo su posición e información con otros vehículos del grupo a través de tecnología de comunicación.
Aunque la investigación actual de Nissan va dirigida a crear vehículos anticolisión basándose en su idea de seguridad llamada ?Escudo de seguridad?*6, las nuevas tecnologías utilizadas en el EPORO también tienen el objetivo de mejorar la eficiencia migratoria de un grupo de vehículos y contribuir a crear un entorno de conducción respetuoso con el medio ambiente y libre de atascos.